如何 Pythonic 的折腾 QR 码?
~ 兼论什么样的模块值得嗯哼...
背景
最近在折腾机器视觉相关的项目, 其中有一项核心需求是:
- 实时的从摄像头视频中
- 识别出特定的标记物
- 并对多个标记物可以区别
- 进而记录所有标记物的 ID 和屏幕坐标
- 记录下来以便另外的系统事后统计/分析/可视化
嗯哼
IRMarker
~ 即红外线标定器
- 之前折腾了很长时间, 配合创客自制了专用的 IRMarker
- 开始是 850nm 的, 因为没有红暴, 人眼基本不可感知
- 但是,发现太弱, 在复杂现实光线中杯具
- 然后,还是传统的 940nm ,人眼微弱感知
- 但是,能量发射足
- 相关元件品种/产量也大
- 可惜:
- 红外光在视频中只有亮度没有颜色
- 和阳光/反射/灯泡 等等所有亮度能到
(255,255,255)的 - 图像中和 IRMarker 的光没有区别
- 尝试用特殊的点阵图形来识别+区分
- 那叫个蛋痛...
QRMark
~ 即, 纸质二维码
首先可以搜索到: zbar 0.10 : Python Package Index
- 这货已经有 8 年没有任何更新了
- 而且 win 版本也没有, 是第三方好人折腾了一个
- 这怎么敢用嚓...
然后继续尝试 Google+Youtube 大法:
- Scanning QR Codes: Verifying the finder patterns - AI Shack - Tutorials for OpenCV, computer vision, deep learning, image processing, neural networks and artificial intelligence.
- OpenCV: QR Code detection and extraction - YouTube
- QR code detection and decode in python - YouTube
- ...
- 学习笔记:使用 OpenCV 识别 QRCode \| Why's Blog
果断有狠人, 根据 QR Code 标准, 准备用 OpenCV 直接手工来解析...
好在所有知识点都是标准的:

QR Code 结构

QR 形式数据读取顺序

QR 解码顺序...

cv2.findContours 函式 cv2.RETR_TREE 模式的嵌套结构

QR 标定点识别方法之一
 QR 标定点识别方法之二
QR 标定点识别方法之二
...
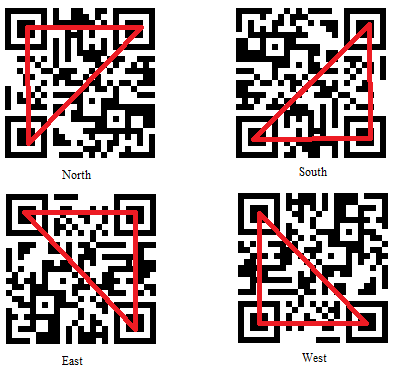
QR 方向判别
所以,纯 OpenCV 的 QR 识别思路是明确的:
- 图像预处理->二值化处理
- 根据
cv2.findContours的结果,找到吻合Position Detection Pattern的结构 - 如果几个嵌套盒结构间的空间关系或是之间的
Timing数据吻合 QR 标准 - 则推导出对应 QR 码的有效面积
- 再进行整形
- 然后根据 QR 的数据区黑白变化提取为 0/1 值, 再进行标准的 decode 就还原为文字了

撞哉
- 一切按照思路以及代码
- 很快冲过 单一 QR 码在视频中的情况
- 当然, 最后读取内容还是用 zbar
- 但是, 多个 QR 码出现在视频中时
- 杯具了:
- 无论怎么调整参数
- 明明非常清晰的图像
- 预处理也非常良好

但是! 原先工作良好的代码,死活就是识别不出所有 Position Detection Pattern
柳岸
~ 碎了一觉起来...
- 想想为毛这么多年就没有 zbar 同类模块出没?
- 回去看了一下官网:ZBar bar code reader

嗯哼? 感觉不是大家懒, 而是 QR Code 标准又没有变, zbar 完美解决了问题的话,
自然没有后来 Yet another zbar 之类的嗯哼了...
只是, 对应python 模块的文档实在简洁, 搜索案例代码:
» Unusual tasks with video files – reading bar-codes and qr-codes
才发现:
... for l in symbol.location: text = str(symbol.type) + ': ' + str(symbol.data) + ' / ' + str(symbol.quality) ...

嗯哼?! what?! 人家 zbar 一直就支持:
- 直接识别并读取多个 QR 码
- 并返回每个 QR 码的坐标
눈_눈<-- 那为毛,内么多文章都是拼命用各种姿势通过 OpenCV 识别出 QR 码- 然后小心的剪裁出来
- 再合理旋转,平整
- 最后喂给 zbar 只有 QR 砩的图片片段?!
- 结果, 核心代码就这么几行
:
import zbar from PIL import Image ... scanner = zbar.ImageScanner() scanner.parse_config('enable') zimage = zbar.Image(width, height, 'Y800', raw) scanner.scan(zimage) for symbol in zimage: for l in symbol.location: text = str(symbol.type) + ': ' + str(symbol.data) + ' / ' + str(symbol.quality)
快速重构原先代码, 几下就完成了原定目标
致谢
-> 汪海
一位认真的普通程序猿, 目测也是折腾了 10小时以上, 幸好依细致的记录了各种基础知识点, 才令俺及时回过味儿来, 找到正确的道路...
特别的回应一下依后来没有嗯哼下去的: 仿射变换
- 直接使用 4 Point OpenCV getPerspective Transform Example - PyImageSearch 中给出的两个函式:
order_points()-> 获得合理的4点坐标- 代入 ->
four_point_transform()-> 就获得修正后的图片了.
PS:

ArUco 更小的标定码形式
OpenCV: Detection of ArUco Markers
问题在, 必须 OpenCV 3.0 以上版本环境才支持!
( ̄▽ ̄)
- 170810 残念
- 170809 南墙
- 170808 部分达成
- 170807 折腾
- 170806 动念
Author:
